Группа исследователей под руководством профессора Алима-Луи Бенаби (Alim-Louis Benabid) из французского Университета Гренобль-Альпы разработала алгоритм для нейрокомпьютерного интерфейса, который считывает электрические сигналы головного мозга, интерпретирует их и передает управляющие команды на различные устройства.
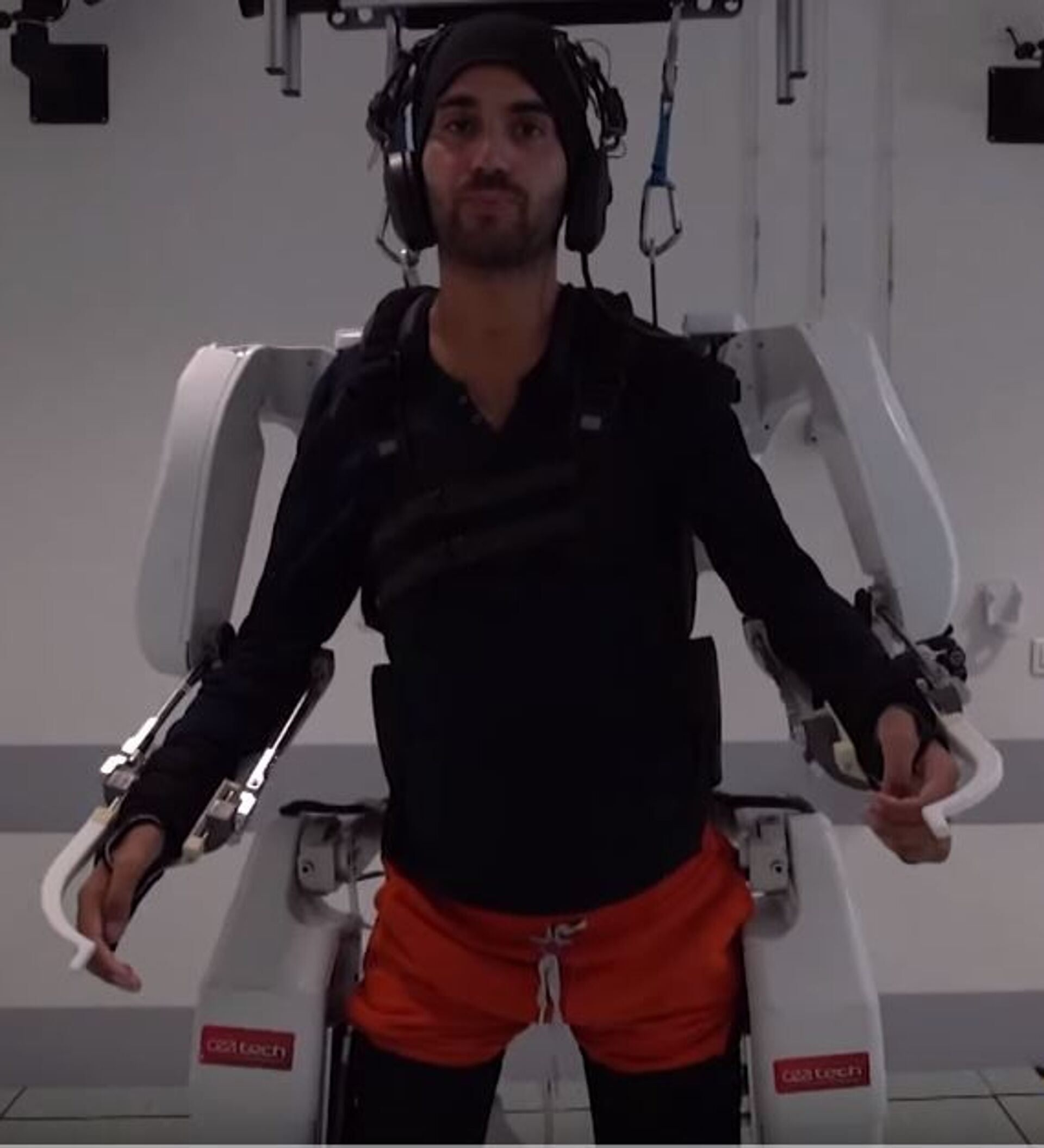
Новая разработка французских ученых позволяет управлять полным экзоскелетом, созданным для движения всеми четырьмя конечностями. В их нейрокомпьютерном интерфейсе используются два сенсорных модуля, закрепленные на правой и левой половинах головы. Эти сенсорные модули соединены с электродами, размещенными под черепной коробкой. Каждый модуль соединен с 64 электродами. Электрические импульсы, регистрируемые модулями с помощью электродов, могут передаваться компьютеру или системе управления экзоскелетом.
Доброволец, который принимал участие в испытании, в возрасте 28 лет практически полностью парализован ниже плеч, может только двигать бицепсом и кистью левой руки, причем эти движения крайне ограничены. Мужчину подключили к нейрокомьютерному интерфейсу два года назад, после чего он проходил постепенное обучение: учился управлять роботизированными манипуляторами, аватаром в виртуальной реальности и экзоскелетом.
Смотрите также:
- Кто кого перепилит: настырная обезьяна уснула, но не проиграла роботу-шпиону
- Миссию выполнил: робот "Федор" больше не полетит в космос




{kind=link}
{kind=link}
{kind=link}
{kind=link}